Autonomy

DARPA Subterranean Challenge
Winning team (Team CERBERUS) of the DARPA Subterranean Challenge.

Unified Autonomy Stack
A field-tested autonomy architecture commanding a diverse set of robots.
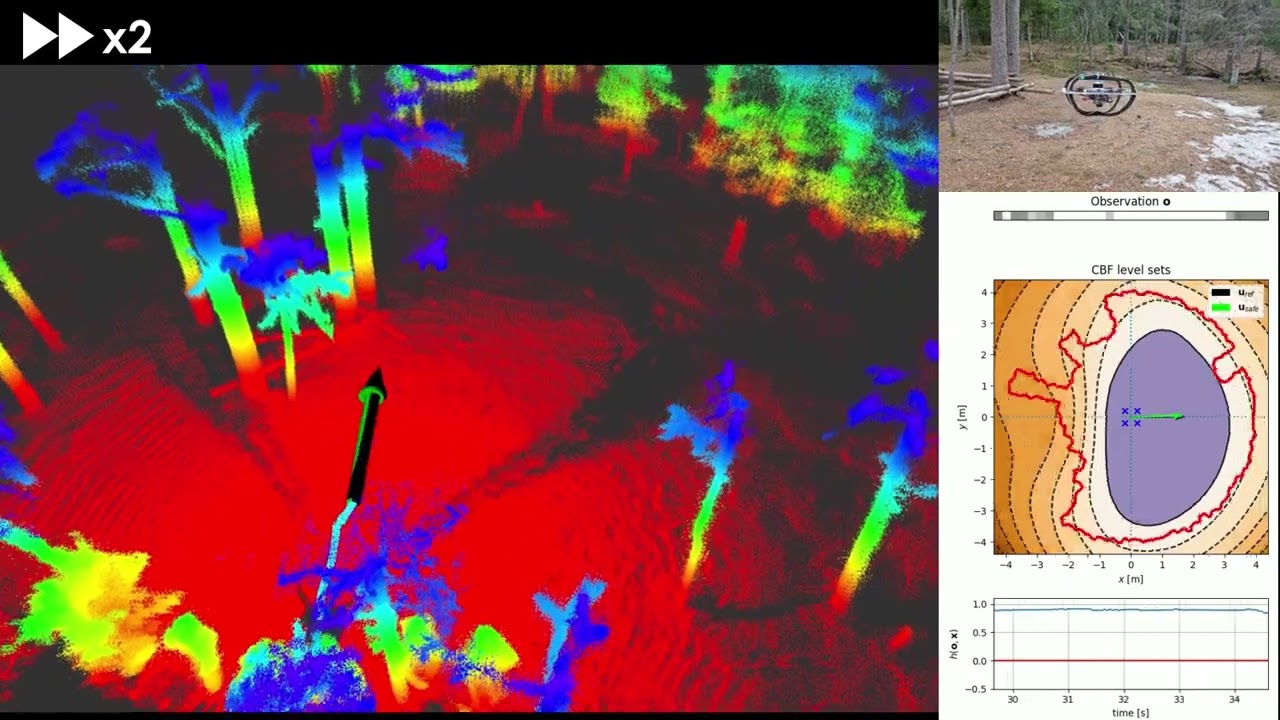
Neural Control Barrier Functions for Safe Navigation
Safe navigation using Neural Control Barrier Functions (NCBFs) for aerial robots.

Manhole Detection and Traversal for Exploration of Ballast Water Tanks using Micro Aerial Vehicles
Enabling micro aerial vehicles to detect and traverse manholes for ballast water tank exploration.
Semantically-enhanced Deep Collision Prediction
Autonomous navigation using aerial robots with semantic awareness for collision prediction.
The Reconfigurable Aerial Robotic Chain: Shape and Motion Planning
Shape and motion planning for a reconfigurable aerial robotic system.
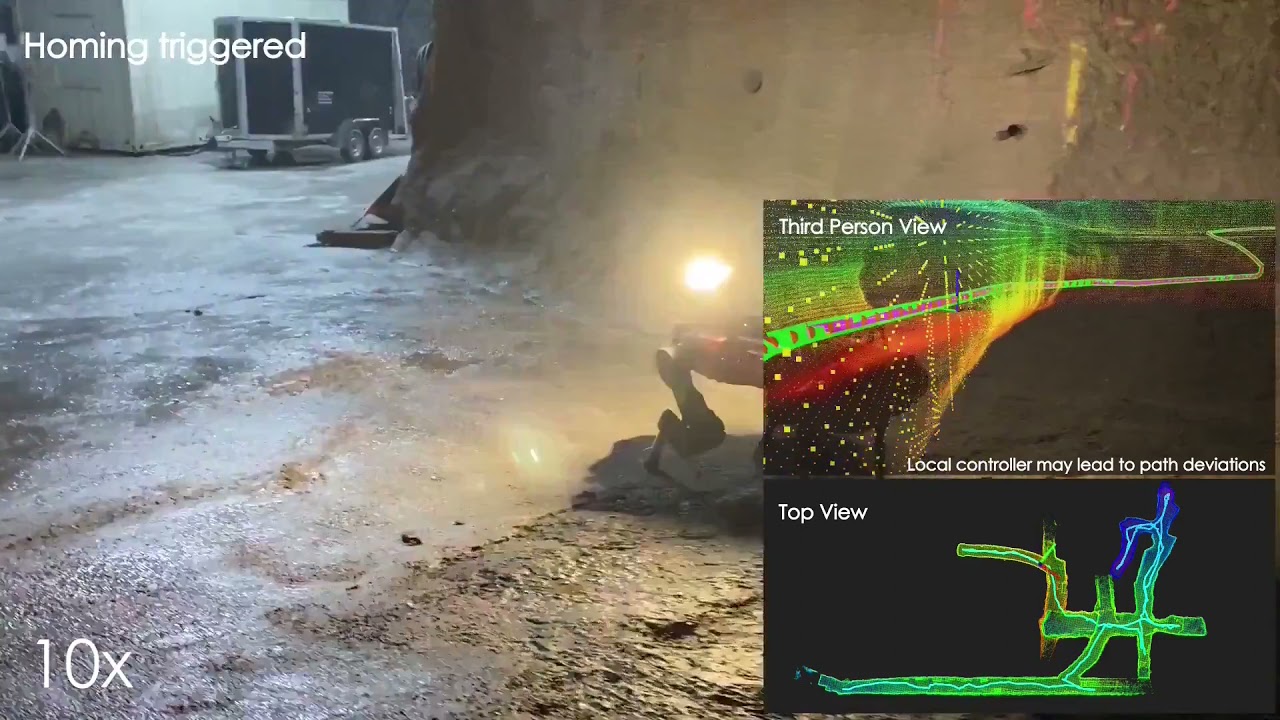
UniPilot: Enabling GPS-Denied Autonomy Across Embodiments
A unified pilot for enabling GPS-denied autonomy across different robotic embodiments.
Autonomous Teamed Exploration (DARPA SubT)
Teamed exploration of subterranean environments using legged and aerial robots.
Semantically-Driven Deep RL for Inspection Path Planning
Deep reinforcement learning approach for inspection path planning with semantic awareness.

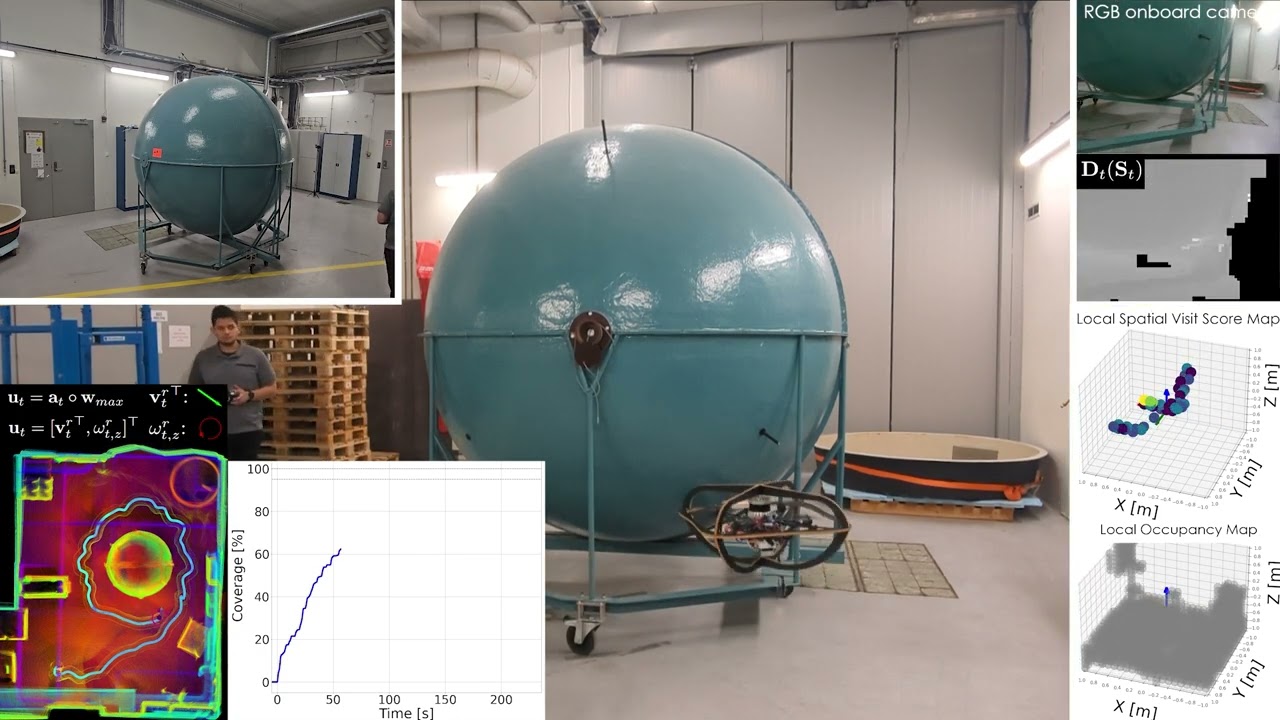
Autonomous Exploration and General Visual Inspection of Ship Ballast Water Tanks using Aerial Robots
General visual inspection of ship ballast water tanks using aerial robots.
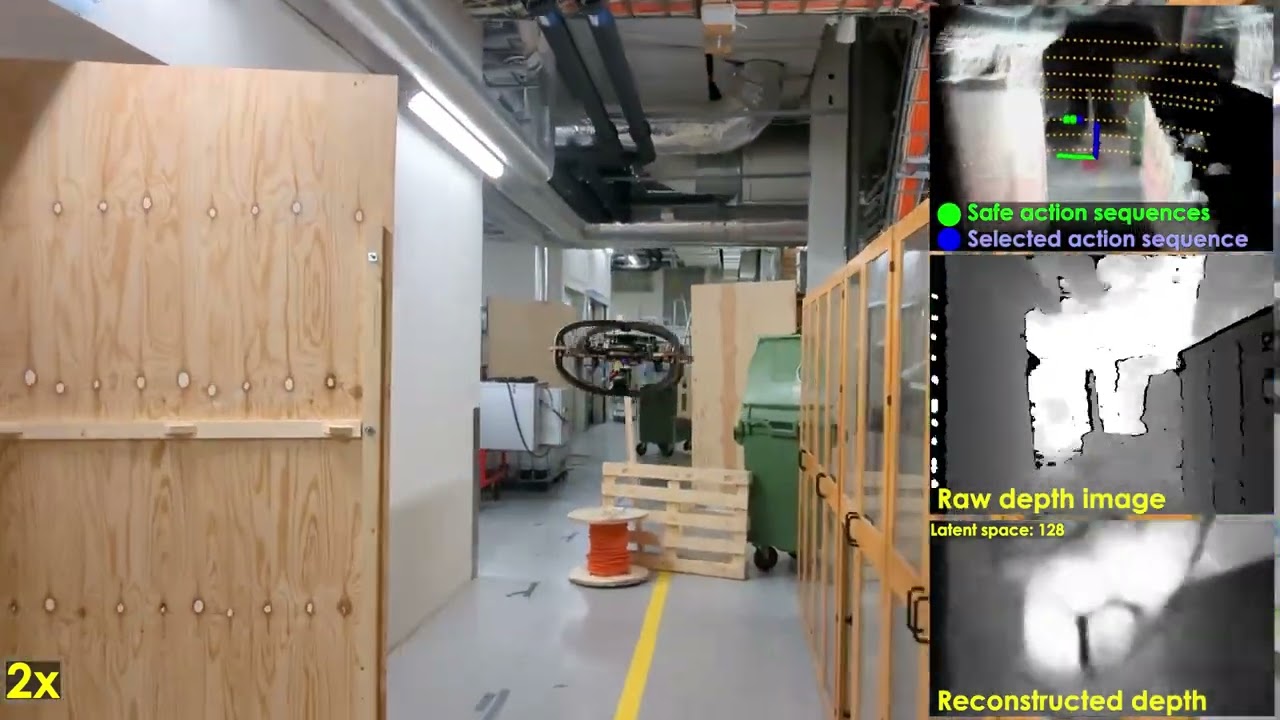
Reinforcement Learning for Collision-free Flight
Exploiting Deep Collision Encoding for autonomous flight in dense environments.

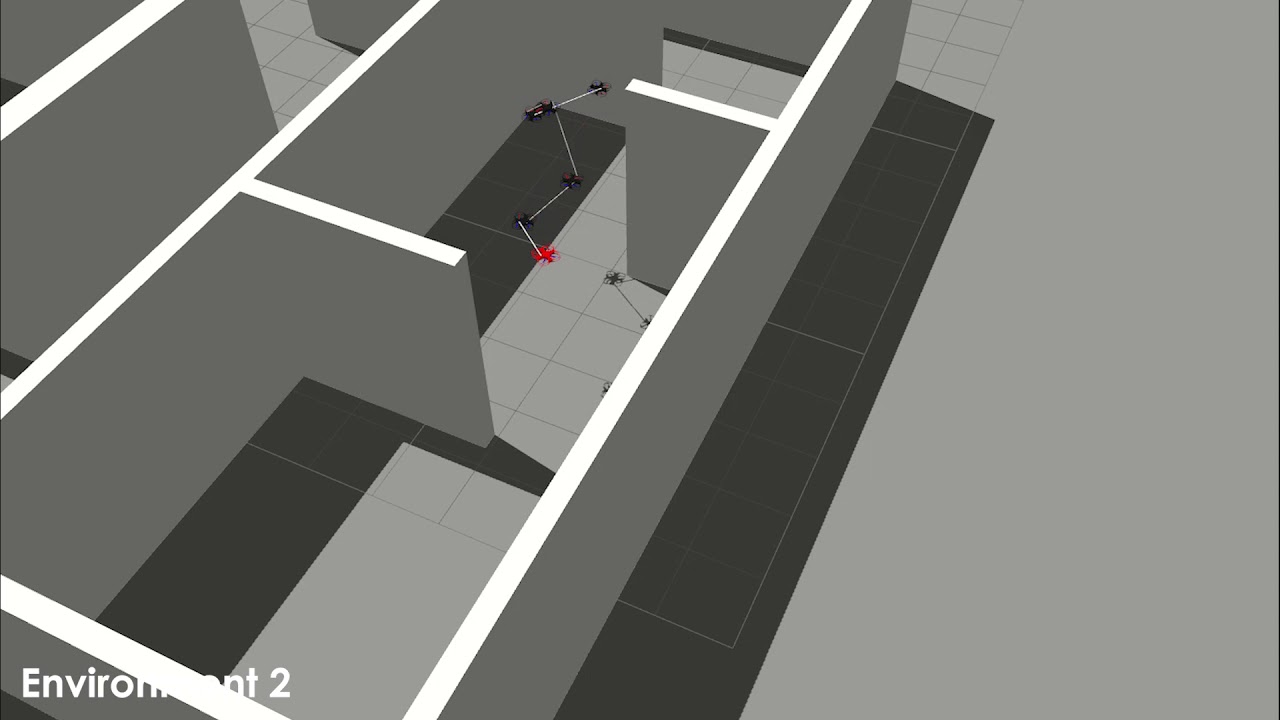
Aerial Gym Simulator
A framework for highly parallelized simulation of aerial robots based on NVIDIA Isaac Gym.
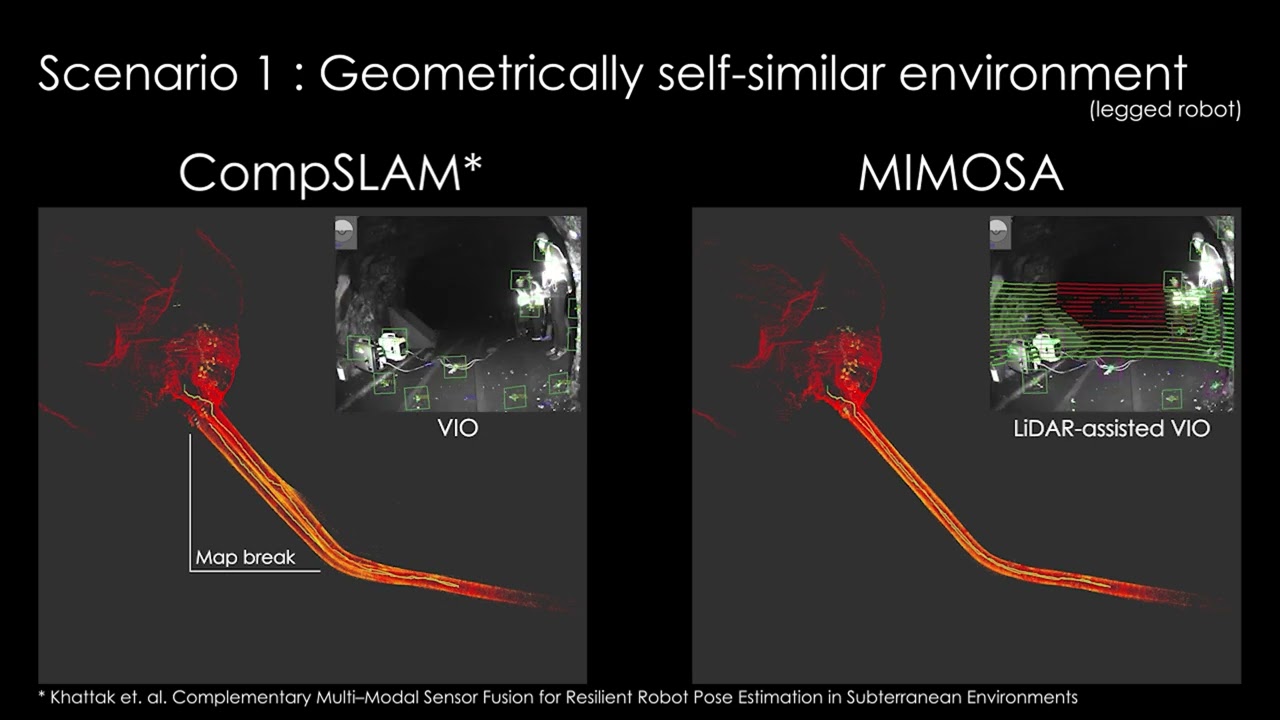
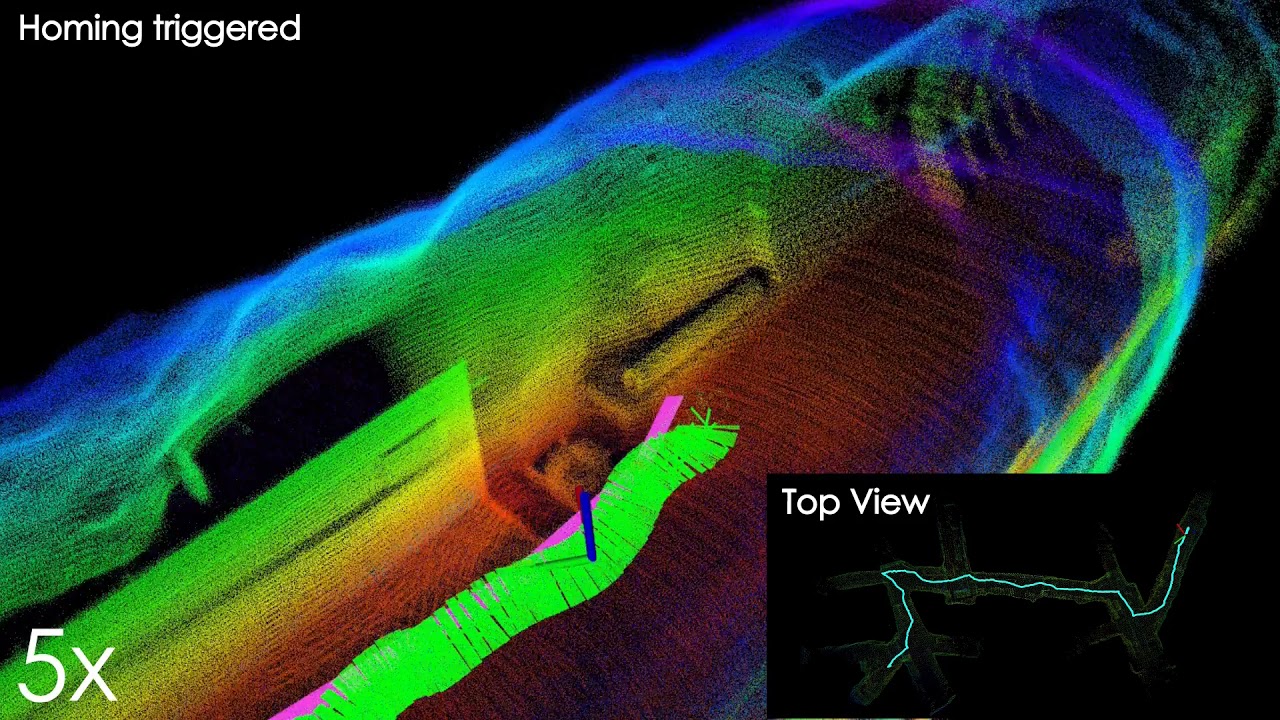
MIMOSA: A Multi-Modal SLAM Framework for Resilient Autonomy against Sensor Degradation
A Multi-Modal SLAM Framework for resilience against sensor degradation.
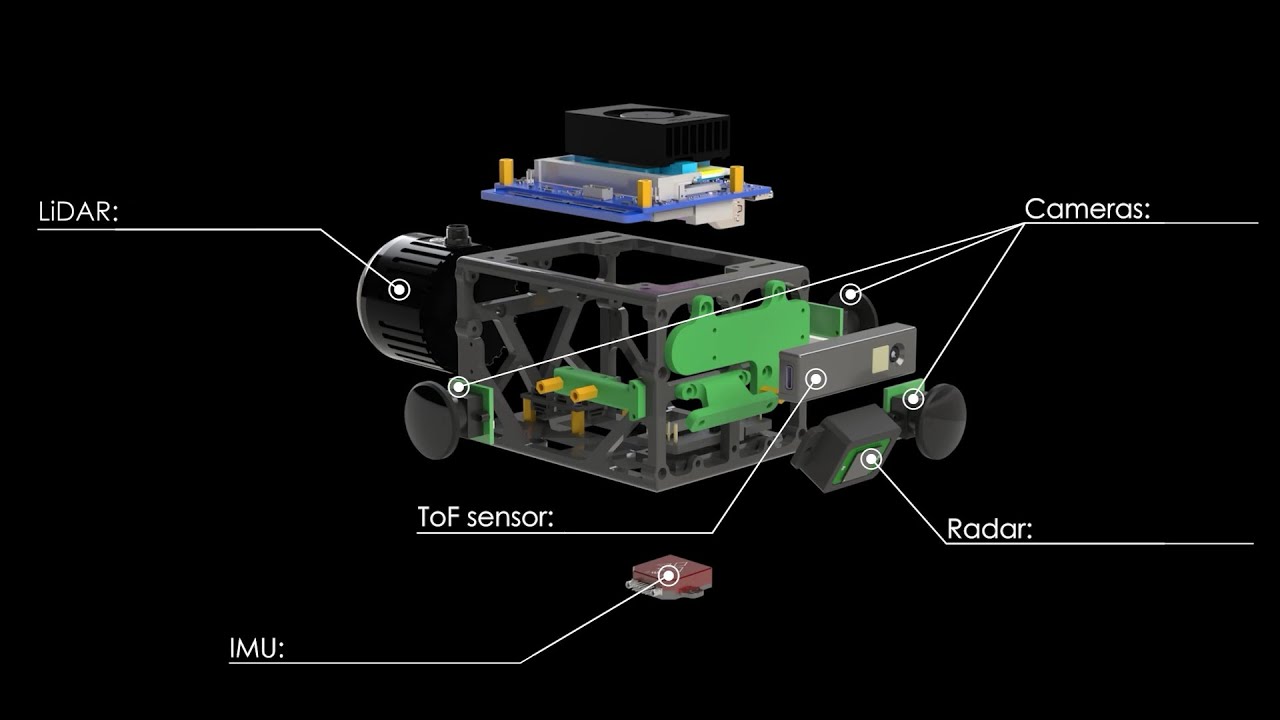
RMF-Owl: A Collision-Tolerant Flying Robot for Autonomous Subterranean Exploration
A collision-tolerant flying robot for autonomous subterranean exploration.