
ईमेल: mihirk284@gmail.com
प्रकाशन मेट्रिक्स:
Citations: 931
h-इंडेक्स: 13
i10-इंडेक्स: 17 



प्रकाशन मेट्रिक्स:
Citations: 931
h-इंडेक्स: 13
i10-इंडेक्स: 17
वैशिष्ट्यीकृत प्रकल्प

Aerial Gym Simulator
A framework for highly parallelized simulation of aerial robots based on NVIDIA Isaac Gym.

Unified Autonomy Stack
A field-tested autonomy architecture commanding a diverse set of robots.
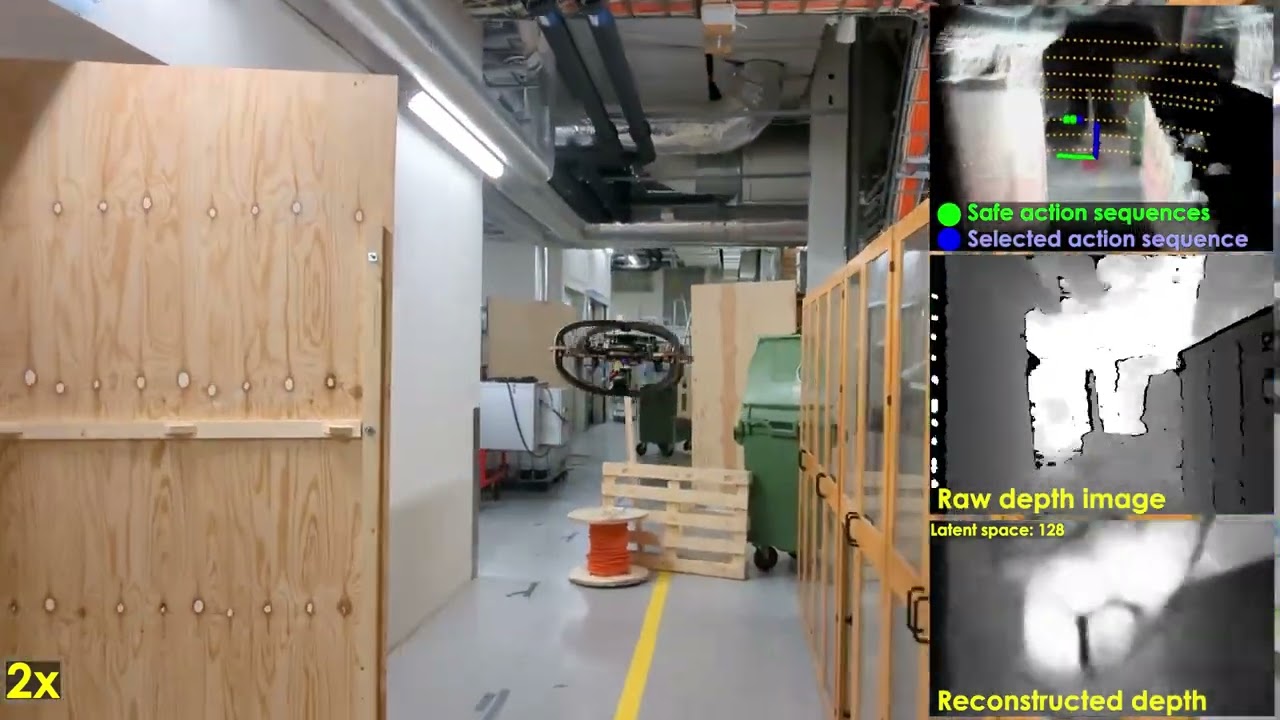
Reinforcement Learning for Collision-free Flight
Exploiting Deep Collision Encoding for autonomous flight in dense environments.
Semantically-enhanced Deep Collision Prediction
Autonomous navigation using aerial robots with semantic awareness for collision prediction.

DARPA Subterranean Challenge
Winning team (Team CERBERUS) of the DARPA Subterranean Challenge.
UniPilot: Enabling GPS-Denied Autonomy Across Embodiments
A unified pilot for enabling GPS-denied autonomy across different robotic embodiments.